DroidGlove_en
日本語ページはこちら。
DroidGlove is an Android app for manipulation of hand or gun in a virtual reality world which is provided by game engines such as Unity3D.
That is like the legendary NES controller.
I made hacked Power Glove into this app.
Binary
Get DroidGlove at Google Play .
How to use app

Initialization
First, to install DroidGlove, follow the steps below.
- Install DroidGlove to your smartphone.
- Turn on Wi-Fi on your phone.
- Launch DroidGlove.
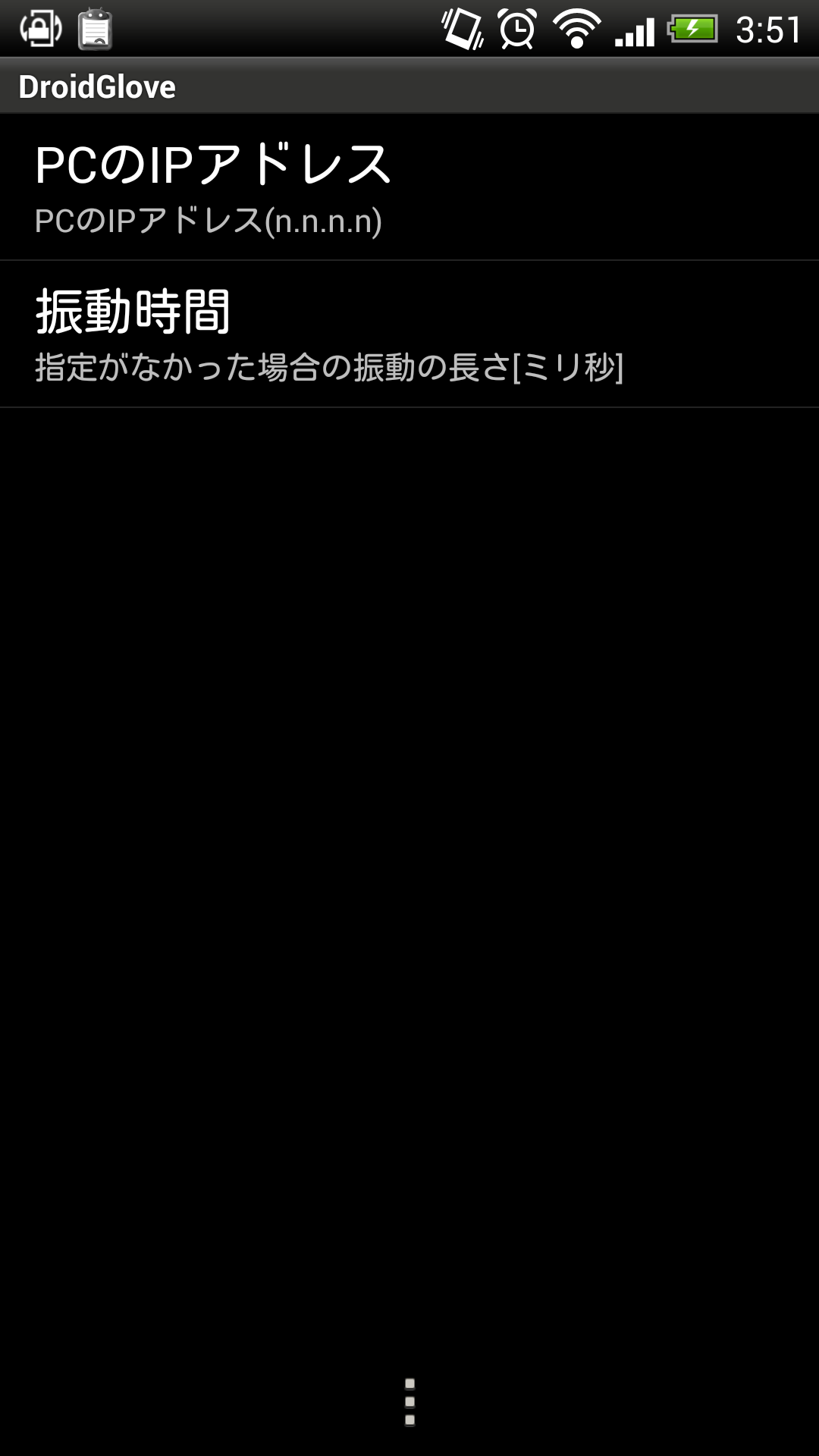
- Input the IP address of your PC to DroidGlove.
- To calibrate direction, aim for the top of your phone at the screen of your PC, and push the reset button.
Next, you are required to configure Windows so that PC software can pass through the firewall. Follow these steps. (These steps are for Windows7)
- Open [Control Panel] > [Windows Firewall].
- Click [Allow a program or feature through Windows Firewall].
- Click [Change settings] button.
- Click [Allow another program] button.
- Click [Browse] button.
- Click PC software which supports DroidGlove such as BobbingBots or Mikujalus, and click [Open] button.
- Click [Add] button.
How To Play
- Launch DroidGlove on your smartphone.
- Launch PC software which support DroidGlove such as BobbingBots or Mikujalus.
- Then, turn your phone. If you want to grip, swipe down on DroidGlove.
Sample Project for Unity
This project includes DroidGlove receiver script and Bobbing-Walking script.
Warning
When you use Bobbing-Walking, follow these instruction to prevent falling to the floor.
- Looking around at first.You must be at least 7 feet away from other objects.
- Make a circle on the floor around you with a roll of tape. And do not step outside of that.
- Do not move fast.
Contact
If you have any question, contact me on Twitter.
Source code
You can get sources at GitHub.
But the latest version is not public yet.
And you have to pay attention that the data format was changed at DroidGlove Ver.1.0.0. (from eular angles to quaternion)
https://github.com/cubic9com/DroidGlove/
Folder structure
| folder | detail |
|---|---|
| src/ | Java sources |
| res/ | resources such as images |
How to use sources
DroidGlove requires JavaOSC, a library for Open Sound Control, which was developed by C. Ramakrishnan, Illposed Software.
- Get JavaOSC at following URL. https://github.com/hoijui/JavaOSC/tree/e2a1667cb198675958012d91a374f9e9705195be
- Copy "modules/core/src/main/java/com" in JavaOSC to "src/" in DroidGlove.
- Import that to a development environment such as the Eclipse IDE with built-in ADT.
- Export app (.apk) .
License
Copyright (C) 2014, cubic9com All rights reserved.
This code is licensed under the BSD 3-Clause license.
See file LICENSE at DroidGlove repository for more information.
The specification of the OSC protocol and packet of DroidGlove
- The port number of a phone is 57100.
- The port number of a PC is also 57100.
- The specification of the packet from a phone to a PC.
- The address is "/droidglove_to_pc".
- Data are float x, float y, float z, float w, int grip.
- x, y, z, and w mean Quaternion of a phone.
- Grip means grip value of the hand. (0 < grip < 100)
- The specification of the packet from a PC to a phone.
- The address is "/droidglove_to_phone".
- The data is int vibrationTime.
- VibrationTime means the duration time[ms] of vibration. If you set it to 0, the duration time will be the time of the preferences of a phone.
Thanks
Thanks to C. Ramakrishnan, Illposed Software, who developed JavaOSC.
Thanks to Alexander Pacha at the Human Interface Technology Laboratory New Zealand, who developed Sensor fusion demo for Android.
DroidGlove is inspired by Little Witch Pie Delivery. Thanks to Haramakoto.