PaxPowerGlove_en
日本語ページはこちら。

I want to touch objects in virtual space.
So I set motion sensor in PAX Power Glove, a legendary NES controller, to control the movement of my hand in the virtual space of Unity .
The original Power Glove generate ultrasonic waves from the two ultrasonic transducers at different times to realize the motion capture.
That idea was great. But it lacked accuracy. So I decided to use motion sensor.
I used only flex sensor, out of original components.
So I set motion sensor in PAX Power Glove, a legendary NES controller, to control the movement of my hand in the virtual space of Unity .
I made that with following procedure.
- getting value of bending of fingers.
- detecting the movement of my hand with motion sensor.
- Integrating 1 and 2.
- communication by XBee.
- Integrating 3 and 4.
- realizing haptics with vibration motor.
- Integrating 5 and 6.
Materials
Hardware
| Item |
|---|
| Arduino |
| PowerGlove |
| Resistance (100k ohm * 4) |
| MPU-9150 |
Sfotware
|Item| |---|---| |Arduino IDE| |Unity| |I2C Device Library| |C# script for Unity3d|
Step 1: detecting the movement of my hand with motion sensor.
Hardware
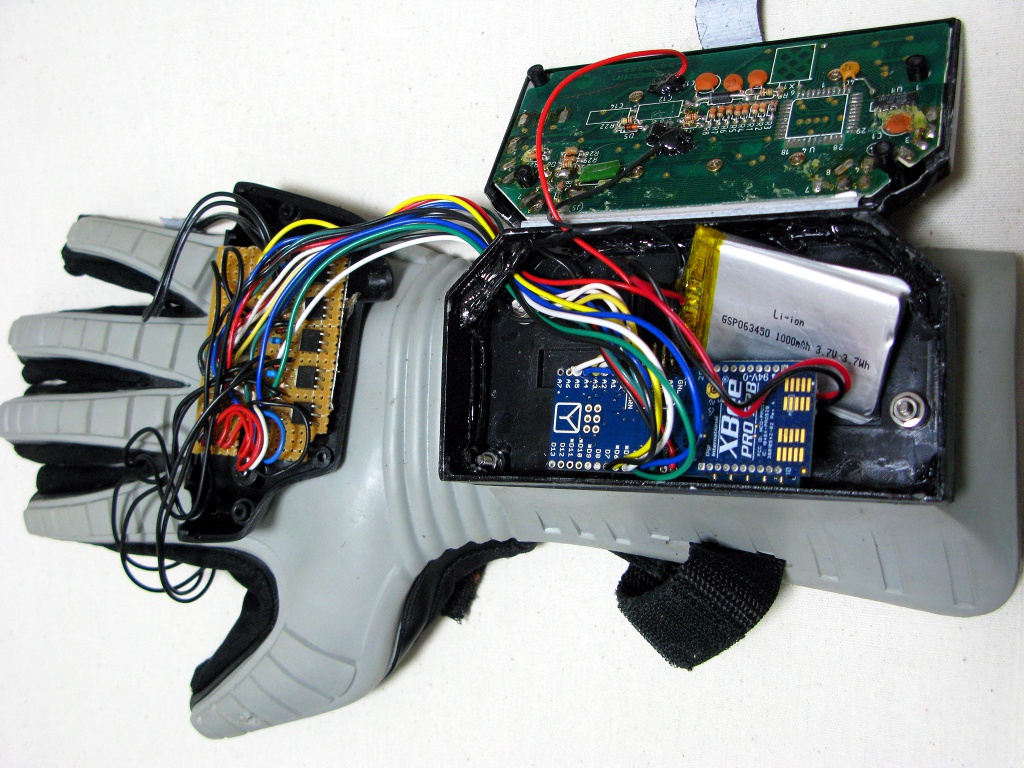
- Remove solder. Take off wires from board.
- Connect red wires to GND. .1 Connect Other wires to resistance to Arduino's 5V. Connect Analog input between wire and resistance.
| finger | wire | analog input |
|---|---|---|
| thumb | blue | A0 |
| index finger | black | A1 |
| middle finger | white | A2 |
| ring finger | brown | A3 |
| littte finger | no wire | - |
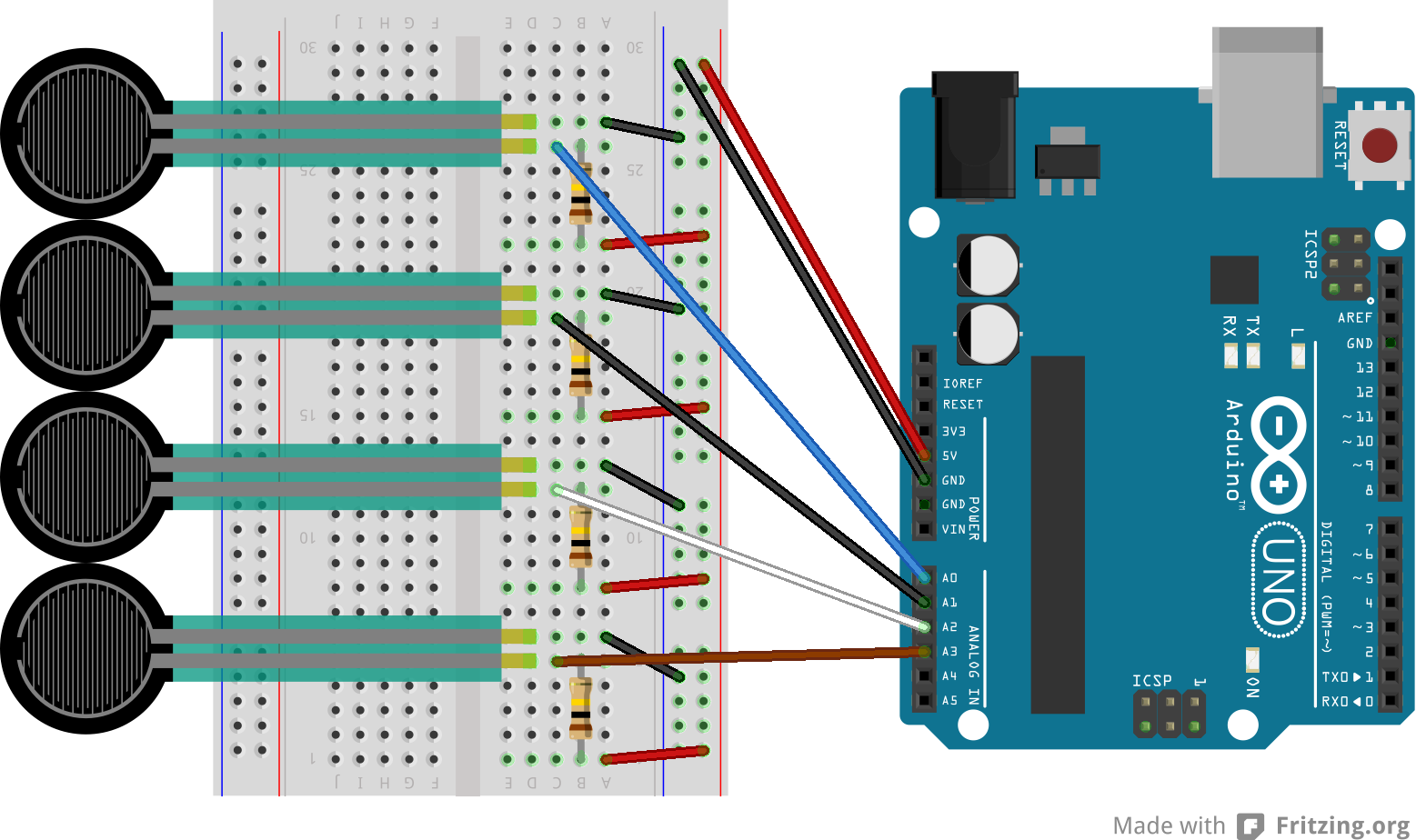
曲げセンサは出力が抵抗値なので、同程度の抵抗器を使うことで抵抗値→電圧値に変換してArduinoに入力する、という回路が上記です。
Software
- Write following sketch to Arduino.
Arduino sketch
int fingers[4];
void setup() {
Serial.begin(9600);
}
void loop() {
int i;
fingers[0] = constrain(map(analogRead(A0), 678, 760, 0, 10), 0, 10) * 10;
fingers[1] = constrain(map(analogRead(A1), 835, 935, 0, 10), 0, 10) * 10;
fingers[2] = constrain(map(analogRead(A2), 770, 905, 0, 10), 0, 10) * 10;
fingers[3] = constrain(map(analogRead(A3), 750, 910, 0, 10), 0, 10) * 10;
for (i = 0; i < 4; i++) {
Serial.print("finger");
Serial.print(i);
Serial.print(":");
Serial.print(fingers[i]);
Serial.print("\t");
}
Serial.println();
delay(200);
}
NOTE: resistance may be different with your PowerGlove.
Step 2: detecting the movement of my hand with motion sensor.
for details, see モーションセンサ . (written in Japanese)
Step 3: Integrating 1 and 2.
Hardware
- Integrate circuit of 1 and 2.
Software(1):Arduino sketch
- Modify sketch, which you made at モーションセンサ .
- Modify line 286-297.
#ifdef OUTPUT_READABLE_QUATERNION
// display quaternion values in easy matrix form: w x y z
mpu.dmpGetQuaternion(&q, fifoBuffer);
Serial.print("quat\t");
Serial.print(q.w);
Serial.print("\t");
Serial.print(q.x);
Serial.print("\t");
Serial.print(q.y);
Serial.print("\t");
- Serial.println(q.z);
+ Serial.print(q.z);
+ Serial.print("\t");
+ Serial.print(constrain(map(analogRead(A0), 678, 760, 0, 10), 0, 10) * 6);
+ Serial.print("\t");
+ Serial.print(constrain(map(analogRead(A1), 835, 935, 0, 10), 0, 10) * 6);
+ Serial.print("\t");
+ Serial.print(constrain(map(analogRead(A2), 770, 905, 0, 10), 0, 10) * 6);
+ Serial.print("\t");
+ Serial.println(constrain(map(analogRead(A3), 750, 910, 0, 10), 0, 10) * 6);
#endif
ソフトウェアの準備(2):Unityプロジェクト
- Download following zip, and open PaxPowerGlove.unity.
Step 4: communication by XBee.

for details, see XBee . (written in Japanese)
Step 5: Integrating 3 and 4.
さあついに、上記3と4を統合します。
- Modify Arduino sketch.
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
- TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
+ TWBR = 12; // for Arduino Fio
// initialize serial communication
// (115200 chosen because it is required for Teapot Demo output, but it's
// really up to you depending on your project)
- Serial.begin(115200);
+ Serial.begin(57600); // for Arduino Fio
Step 6: realizing haptics with vibration motor.
Hardware
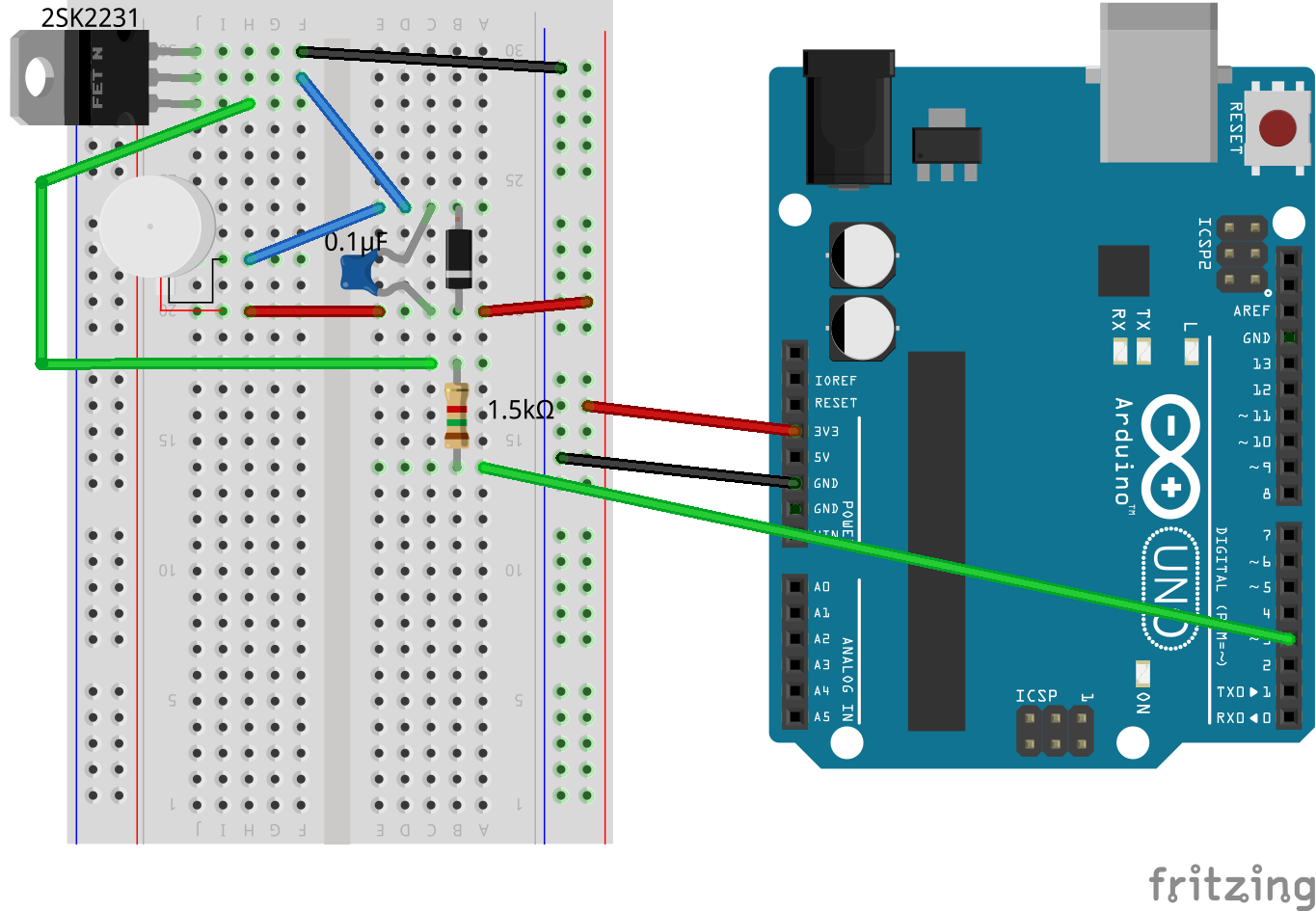
Software
W.I.P.
char c = Serial.read();
if (c != -1) {
c -= '0';
for (int i = 0; i < 5; i++) {
if ((c & 0b00010000) != 0) {
digitalWrite(3, HIGH);
}
if ((c & 0b00001000) != 0) {
digitalWrite(4, HIGH);
}
if ((c & 0b00000100) != 0) {
digitalWrite(5, HIGH);
}
delay(7);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
if ((c & 0b00000010) != 0) {
digitalWrite(6, HIGH);
}
if ((c & 0b00000001) != 0) {
digitalWrite(7, HIGH);
}
delay(7);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
}
Step 7: Integrating 5 and 6.
W.I.P.
Prototypes